
- Maritime & naval
- Issue 68
Against the tide
The Royal National Lifeboat Institution introduced the Shannon class all-weather lifeboat in 2014, which uses cutting-edge technology, is faster and more manoeuvrable than existing vessels, and has a quicker and safer launch and recovery system. Read about the design and production of the lifeboat.

- Software & computer science
- Issue 68
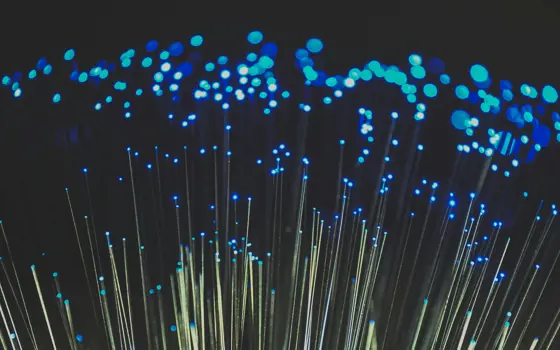
Broadband in the backwaters: rural Britain's fight for faster internet
Superfast broadband is non-existent in some parts of rural Britain and the situation may not change soon. What is the state of broadband in the UK, what options are available and what are some innovative engineering solutions generated by rural communities to tackle the problem?
Quick read

- Materials
- How does that work?
- Issue 68
Toughened glass
A stronger version of standard glass, toughened glass is ideal for use where greater strength or safety is needed. Learn how thermal and chemical treatments enhance strength, safety and durability for various applications.
- Mechanical
- Innovation Watch
- Issue 68
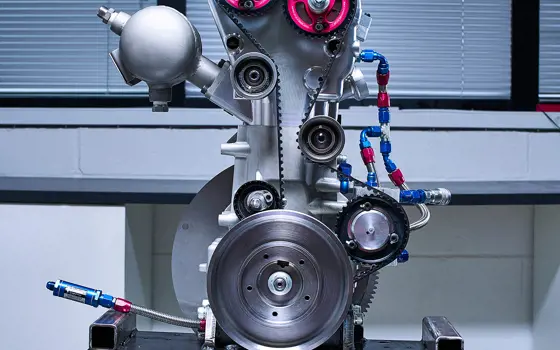
Delivering clean cold and power
Global technology company Dearman has developed a family of engines that uses liquid air to deliver zero-emission power and cooling, with Sainsbury’s becoming the first company in the world to introduce a refrigerated delivery truck cooled by this novel engine.

- Health & medical
- Design & manufacturing
- Issue 68
Intelligent prosthetics
Prosthetic limbs can help many amputees regain independence and mobility. The Linx limb system, winner of the 2016 MacRobert Award, developed by Blatchford, has smart robotics that constantly monitor and adapt to movement, making walking and movement more natural for lower-leg amputees.

- Energy
- Profiles
- Issue 68
Energy with connections
When Steve Holliday FREng moved from the oil industry into energy distribution, the sector was seen as staid. In reality, during his years at National Grid, the sector became increasingly important as the need to tackle climate change led to a transformation in the UK’s energy mix.
- Software & computer science
- Opinion
- Issue 68
Broadband needs its champions
Access to fast and affordable broadband communication has become an essential part of modern life. Dr David Cleevely CBE FREng, founder of several telecoms businesses, maintains that any strategy to deliver universal broadband has to jump from a high cost/low demand model to low cost/high demand.

- Civil & structural
- Issue 68
In deep water: The UK's first subsea-to-shore gas plant
Lying 125 kilometres west of the Shetland Islands, the Laggan-Tormore project involved the development of two gas fields and construction of a gas-processing plant and export pipeline in some challenging circumstances requiring innovation for its development.