
A great British polar explorer
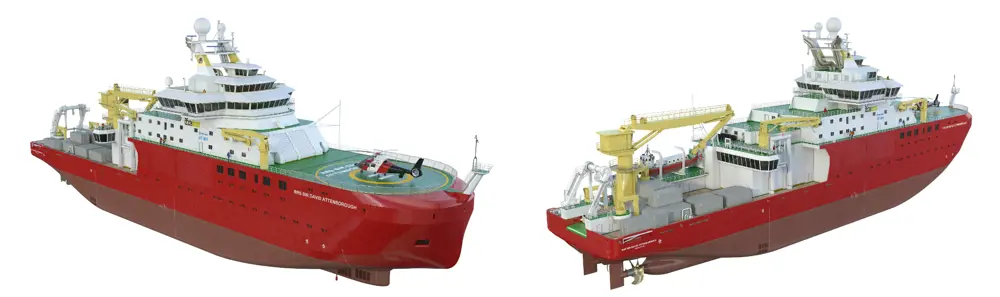
Attempts to understand and respond to the challenges of climate change depend on improving our understanding of the processes involved. The climate research community in the UK now has a new tool, the Royal Research Ship (RRS) Sir David Attenborough, which will replace two ageing polar research ships and enable world-leading research in Antarctica and the Arctic for the next 25 years. Like many ‘scientific instruments’, this 129-metre-long vessel pushed maritime engineering to its limits, in a design that optimises the vessel’s ability to support science in extreme environments. It includes instruments and laboratories that will enable scientists to study the ocean, seafloor and atmosphere. When it becomes operational in 2019, the ship will be capable of spending 60 days at sea without resupply over a range of 35,000 kilometres. It will also be able to deploy, operate and control a range of remote-piloted, state-of-the-art robotic technologies.
Commissioned by the UK’s National Environmental Research Council (NERC), built by Cammell Laird to a Rolls-Royce design and operated by the British Antarctic Survey (BAS), it is the result of a £200 million investment from the UK government. The polar ship will operate throughout the year, supporting an Arctic research cruise in the northern summer and carrying out research programmes and transporting people and supplies to BAS research stations in Antarctica during the austral summer.
Vital statistics
🚢 The specifications of the research vessel that pushed maritime engineering to its limits
- Length: 129 metres; beam: 24 metres; weight: 15,000 gross tonnes
- Scientific cargo volume of approximately 900 cubic metres
- Endurance: up to 60 days (Polar regions)
- Range: 19,000 nautical miles at 13 knots (24 kilometres an hour) cruising speed – more than enough for a return trip from England to Rothera Research Station on the Antarctic Peninsula, or to circle the entire Antarctic continent twice!
- Ice breaking capability: up to 1 metre thick at 3 knots (5.6 kilometres an hour)
- Bow and stern thrusters for excellent dynamic positioning in challenging conditions
- Launch and recovery of aerial and ocean robotic systems
- Crew: approximately 30
- Accommodation for up to 60 scientists and support staff
Specially-shaped hull for icebreaking
The combination of untraditional requirements and multifunctionality of polar research vessels makes the RRS Sir David Attenborough’s hull special, but also created the most engineering challenges. Engineers working on the ship, together with scientists from BAS and UK universities, had to design a ship that makes minimal underwater radiated noise (URN) while producing extreme force when breaking ice and cutting through towering ocean waves to achieve its missions, all while carrying supplies. While icebreaking is of vital importance to the ship, it is only part of its operating profile; the vessel must behave predictably and be fuel efficient in all operating modes during a year of operation.
When it comes to icebreaking, the RRS Sir David Attenborough can cut through ice up to 1.5 metres thick with additional snow cover, at a minimum speed of three knots. It will do this by using a clever arrangement of powerful engines and its specially-shaped hull. The shape of the vessel’s silent hull is developed from other icebreakers designed by Rolls-Royce, and is informed by the company’s experience gained from designing more than 1,000 fishing, seismic research and offshore vessels. Engineers used advanced computer modelling techniques and multiple model tests to come up with the hull shape, which is a refinement of the typically flat bow. However, it is not too flat, as the flatter the bow, the higher the risk of ‘slamming’, the term used to describe the juddering crash when a hull that has risen upwards as it moves through a wave falls back into the water – it is noisy, slows the ship down and can even damage the structure.
Engineers have designed the ship’s hull so that it breaks the ice by pushing it down and shoving as much as possible below and to the side of the unbroken ice sheet. By doing this, less ice will follow the water flow at the bottom of the vessel and end up in the propellers, which creates noise, power peaks and loss in thrust, as well as in the broken channel behind the vessel. This area should be as open as possible to allow towing of equipment for scientific work and reversing if necessary. The underwater design of the aftship, which houses the two large propellers, is also designed for maximum strength and to allow ice to flow behind the ship without risk of it jamming between the specially designed twin ‘skegs’ (the tapering after the keel) © Rolls-Royce
Both the water flow around the hull and the airflow over the structure were computer modelled in detail to understand how the shape would interact with its environment. This was important from the ship’s running prospective and also for the scientific measurements. The generation of bubbles from the hull’s movement through the water and how they flow around the hull’s surface could have a significant negative effect on acoustic sonars. Extremely low underwater radiated noise is essential to avoid interference with survey equipment and to minimise disturbance to marine mammals or fish distribution.
Extremely low underwater radiated noise is essential to avoid interference with survey equipment and to minimise disturbance to marine mammals or fish distribution
This meant that it was important for engineers to find the best location for underwater acoustic equipment, while antennas and meteorological sensors needed to be in a place where they will have an undisturbed flow and would not be polluted by exhaust or ventilation outlets. To do this, Rolls-Royce engineers carried out a comprehensive computational fluid dynamics (CFD) study that looked at underwater analysis for different sea states and at various speeds through the water. As a result, connections were carefully welded and smoothed to avoid vortexes so that bubbles will not interfere with scientific transducers and sensors fitted on the hull. The team developed bow and bottom shapes that will lead bubbles away from the sensors, known as ‘sweep-down’.
Quieter engines to prevent environmental distuption
One of the key challenges of designing the ship was to make it powerful enough to break ice, but also enable ‘silent running’ for environmental monitoring and to not have a detrimental impact on its surroundings. Since the Industrial Revolution, our oceans have become around 100 times louder, which is of concern to conservationists who believe vessel noise can have a devastating impact on already struggling species such as whales. The ship must also be quiet so not to have a damaging effect on scientists’ research.
One of the key challenges of designing the ship was to make it powerful enough to break ice, but also enable ‘silent running’ for environmental monitoring and to not have a detrimental impact on its surroundings
The RRS Sir David Attenborough has four Rolls-Royce Bergen B33:45 engines onboard, which provide the mechanical propulsion to push the ship through the ice. Two of them are nine cylinder and two six cylinder, which together produce 18 megawatts of energy to drive two propeller shafts.
Propellers and the main engine are normally the biggest source of noise, so engineers designed both the foundations and the ship structure to reduce the noise and vibration levels in a wide frequency range, enabling the vessel to meet the strictest noise and vibration levels possible. Engineers used finite element method (FEM) analysis when developing the critical steel structure, which ensures the lowest impact on the sensitive sealife and the best comfort for the crew and scientists onboard. The nine cylinder engines are designed with a rigid cast iron block with significantly reduced vibration levels. They are ‘double resilient mounted’ to dampen out and reduce the transfer of noise to the vessel’s hull and then into the surrounding sea.
All engine connections and other noise-generating machinery onboard, such as pumps and compressors, are via flexibles to further prevent the transmission of noise into the hull. The RRS Sir David Attenborough also has two Rolls-Royce five-bladed controllable pitch propellers, which form part of a Rolls-Royce Promas unit. This unit integrates the propeller with a hubcap, rubber bulb and a special rudder profile to provide very high steering forces and minimise drag and noise.
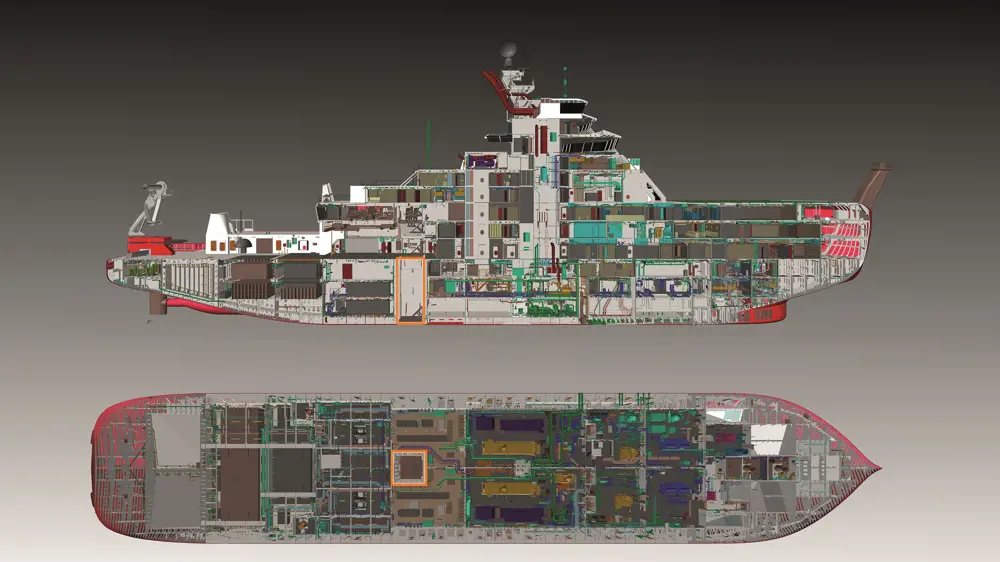
The RRS Sir David Attenborough is the first British polar research ship to have a moon pool – its location on the ship is indicated by the orange coloured squares on the image above. A watertight, hydraulically-operated single leaf door secures the moon pool, and opens to leave a four metre by four metre clear space through to the bottom of the ship. The trolley arrangement that is used to guide equipment into the ocean can be seen just above the coloured box on the top image © Rolls-Royce
The ship uses variable valve timing, an intelligent system that responds to load, to ensure the engines always receive the ideal amount of air for maximum responsiveness and efficiency. Running at a fixed speed of 720rpm, they use low sulphur fuel and have good fuel efficiency. They are also fitted with selective catalytic reduction systems, which are integrated into the electronic engine management system and monitor and control all key engine functions and exhaust after treatment.
The engines provide electric power generation onboard to reduce the vessel’s fuel consumption, emissions, noise and vibration, as well as increasing redundancy and consequently safety. Two energy storage units are connected to the main switchboard, which will each provide a peak output of 2750 kilowatts, as well as fulfilling a blackout prevention function in the event that the running generator trips off the switchboard. This will enable more efficient use of the generators by providing the safety backup that would otherwise require running a second generator.
The vessel has two completely separate engine rooms with duplicated systems in each, which should provide resilience in the event of an issue in one engine room. It also increases efficiency as it will be possible to power down some systems in one engine room while running normally on the other.
The first moon pool
The RRS Sir David Attenborough is the first British polar research ship to feature a moon pool – a vertical shaft measuring 11 metres high that runs through the vessel so it is open at deck level and the sea at the hull. Moon pools are becoming a more common feature on research vessels as they enable the ships to operate in more sea states, including ice flows, where previously submarines and other instruments could not be deployed over the side of ships.
The moon pool’s purpose is to allow scientific equipment to be deployed and recovered at the most stable part of the hull, which is easier and safer than deploying submarines over the side in rough seas. There is a cursor, or trolley arrangement, that guides the equipment as it passes through the pool, which has a hydraulically operating, rotating latching mechanism that will accurately position loads as they pass through the moon pool trunk. To do this, there are two full height rails at the forward end of the moon pool for most equipment. However, for equipment that requires greater support, because of its size or positioning, there are a further two rails at the aft end of the trunk itself that give greater stability to deployed equipment.
Marine Robotics
During its polar missions, the RRS Sir David Attenborough will deploy a new generation of autonomous and remotely operated vehicles. Its ocean gliders and submersible vehicles will enable scientists to access real-time data efficiently, which optimises use of time and research resources. Data from these deployments will shed new light on what happens when ocean water melts Antarctic ice shelves, and how this may influence future sea-level rise.

Boaty McBoatface is one of several autonomous unmanned vehicles onboard the RRS Sir David Attenborough. Robotic submarines and marine gliders will collect data on ocean conditions and marine biology and deliver it to scientists working in the ship’s onboard laboratories © National Oceanography Centre
The ship’s autonomous underwater vehicles (AUVs) have been developed and built by the Marine Autonomous Robotic Systems Group, which is part of the National Marine Facilities based at the National Oceanography Centre (NOC) in Southampton. The AUVs include the long-range autosub named Boaty McBoatface as a result of a public vote. Despite being a third the weight of older models Autosub3 and Autosub6000, Boaty can travel for more than 10 times the distance and stay in the water for longer. The key to this performance is efficient propulsion at a slow speed and by keeping tight control of the power used by the AUV sensors and control systems. This is possible thanks to improved microprocessors, which have ample processing power but use very little energy.
The autonomous unmanned yellow submarine can travel under ice and reach depths of 6,000 metres with a 6,000-kilometre range, allowing it to collect data from locations that may be dangerous or impossible for humans to reach. Using sensors, it can measure ocean and seabed properties, such as: conductivity; temperature and depth; ocean turbulence with a micro-structure probe; the amount of phytoplankton in the water by measuring the fluorescence of their chlorophyll; and turbidity (cloudiness or haziness). Acoustic instruments measure the water current up to 80 metres above and below Boaty’s position, as well as the depth of the seabed and the draft of the ice along the vehicle’s track.
The autonomous unmanned yellow submarine can travel under ice and reach depths of 6,000 metres with a 6,000-kilometre range, allowing it to collect data from locations that may be dangerous or impossible for humans to reach
Environmental credentials
🔋 How the RRS Sir David Attenborough conformed to strict environmental regulations
The RRS Sir David Attenborough has to conform to stringent environmental regulations that are part of the International Maritime Organisation’s (IMO) Polar Code, including the MARPOL convention, which is designed to prevent the pollution of the marine environment by ships, whether by accident or during routine operations.
Engines: Four main engines are configured to operate efficiently across the wide range of conditions that the vessel is likely to encounter. A smaller harbour generator is also installed to allow the vessel to operate when in port without the main engines idling.
Batteries: It has electrical systems with five megawatts of peak effective battery capacity. Batteries reduce the vessel’s fuel consumption, emissions, noise and vibration, as well as increasing redundancy and, consequently, safety.
Oil: An oily bilge water separator, consisting of a high-speed centrifuge, will reduce the oil content of the bilge water discharged.
Sewage: Two sewage treatment plants treat black water (sewage) and grey water (other domestic wastewater) to meet the discharge standards required by MARPOL and the US Coast Guard. In areas such as the Antarctic, where zero discharge of sewage is permitted, holding tanks capable of storing waste for 45 days are provided.
Ballast water treatment: The onboard ballast water system has an approved treatment plant following the IMO’s International Convention for the Control and Management of Ships’ Ballast Water and Sediments. It controls the transfer of harmful aquatic organisms and pathogens through the ship’s ballast water system into the ocean.
Protection from marine growth: The ship’s hull is coated with a non-toxic paint system that provides a hard, impermeable coating that, along with manual removal of fouling at an early stage, offers longlasting protection without the use of chemicals. Furthermore, the internal seawater systems are protected by an electro-chlorination unit that uses sodium chloride and an electrolyser to generate sodium hypochlorite. This chemical prevents growth of marine organisms in the ship’s cooling systems.
Noise: For underwater radiated noise, the vessel has been designed to achieve a DNV-GL Silent (R) notation during surveys at speeds up to and including 11 knots, and a DNV-GL Silent (S) notation while towing seismic equipment at 6 to 8 knots in calm seas, preventing noise pollution that could otherwise negatively impact polar wildlife as well as science experiments.
Green passport: This facilitates the application of the IMO Guidelines on Ship Recycling. This document is produced by the shipyard at the construction stage and contains an inventory of all materials used in the construction of the ship.
Before launch from a research ship, scientists program the AUV’s computers with instructions of where to go, what to measure and what depths to go to. With no link to the mothership, all communications with the AUV use acoustics while it is underwater (with a typical range of a few kilometres). However, Boaty periodically surfaces and transmits data back to the scientists via a satellite data link.
Boaty’s first under-ice mission was beneath the Filchner Ice Shelf in West Antarctica, which is the second largest of its type in the world. The sub spent a total of 51 hours under the Antarctic ice, travelling 108 kilometres over the duration of the deployment and plunging to depths of 944 metres. It spent 20 hours exploring beneath a section of the ice shelf that was 550 metres thick. It was a challenging deployment for the autosub, with sea temperatures very close to the freezing point of seawater beneath ice shelves, where there are significant tidal currents and the high southerly latitudes posed difficulties for the AUV’s underwater navigation. By travelling underneath floating ice shelves, the AUV has the potential to aid investigations about rapid and sudden ice mass loss.
Accurate navigation is a challenge for an AUV. At the sea surface, they can be positioned using GPS, but satellite signals cannot penetrate the top few millimetres of the ocean. They rely on an approach known as dead reckoning: the AUVs bounce sound off the seabed and can measure their speed relative to it by measuring the Doppler shift of the echoes. The AUV must also accurately sense its heading, using a fibre optic gyro-based sensor to give accuracy of better than 0.1 degrees. Overall, accuracies of about one metre error for each kilometre travelled are achievable. Navigation accuracy is critical to many survey missions, so the NOC is researching and developing techniques to improve upon this performance. Boaty has one drawback: while it can track geographic features and stay a certain distance from the sea floor, it cannot avoid unexpected obstacles.
The ship does not have ocean gliders of its own, but will deploy those owned by institutions or borrowed from the National Marine Equipment Pool at the NOC. Despite this, gliders are a key scientific instrument for the ship, as they can be used to measure oceanographic parameters such as chlorophyll levels, temperature and salinity, which are then transmitted back to the ship.
While AUVs are propeller driven, gliders use an expandable oil-filled bladder to change their buoyancy, enabling them to move vertically in the water. As liquid is pumped in or out of the bladder, the volume of the glider changes while its mass remains the same. The movement of internal weights back and forth enables a glider to angle itself to dive or climb in the water and it has an inbuilt compass, which it uses to steer a course. The gliders move slowly, at less than 1 mph, but can maintain this speed for months on end. The slow and gentle way a glider flies enables it to measure from 1,000 metres to within a couple of metres of the surface, without disturbing the structure of what it is measuring.
While the glider technology has been around for about 20 years, modern gliders carry a payload of modern scientific sensors. A glider’s great strength is its ability to build up a picture of the structure of the ocean in both space and time, called 4D sampling, which gives scientists fine detail over a wide area. They are good at mapping the position of oceanic fronts, plotting the change in the thermocline where the surface water meets the deep oceanic water and many other slowly changing features that are important in the calculations behind oceanic global warming models.
Ready for the sea
In early July 2018, the ship was launched for the first time into the River Mersey from Cammell Laird’s shipyard in Birkenhead, by its namesake Sir David Attenborough. Highlighting the importance of the research ship and the role it is expected to play in positioning the UK at the forefront of climate science, Sir David said: “This ship is going to be key to the future salvage of our planet or at least its preservation.” Using its technical abilities and sophisticated instruments, let’s hope it helps preserve the Earth’s polar regions for generations to come.
This ship is going to be key to the future salvage of our planet or at least its preservation
For updates from the RRS Sir David Attenborough, visit the British Antarctic Survey's website.
***
This article has been adapted from "A great British polar explorer", which originally appeared in the print edition of Ingenia 76 (September 2018).
Contributors
Sarah Griffiths
Author
Einar Vegsund is the Director of Ship Design Solutions at Kongsberg Maritime. At the time of writing he was Vice-President Design and Hydro at Rolls-Royce – Marine, which was acquired by Kongsberg. He held leading roles in the Rolls-Royce Ship Design & Systems team since 2002.
Lars Alv Haugen is a contract manager for Kongsberg Maritime. At the time of publishing, he managed contracts for Rolls-Royce – Marine, before it was acquired by Kongsberg, with responsibility for coordination of the installation and commissioning of all Rolls-Royce equipment. He has been with Rolls-Royce since 2004, following senior engineering roles at ABB and Teekay Shipping.
Keep up-to-date with Ingenia for free
SubscribeRelated content
Environment & sustainability

Recycling household waste
The percentage of waste recycled in the UK has risen rapidly over the past 20 years, thanks to breakthroughs in the way waste is processed. Find out about what happens to household waste and recent technological developments in the UK.

Upgrade existing buildings to reduce emissions
Much of the UK’s existing buildings predate modern energy standards. Patrick Bellew of Atelier Ten, a company that pioneered environmental innovations, suggests that a National Infrastructure Project is needed to tackle waste and inefficiency.

An appetite for oil
The Gobbler boat’s compact and lightweight dimensions coupled with complex oil-skimming technology provide a safer and more effective way of containing and cleaning up oil spills, both in harbour and at sea.

Future-proofing the next generation of wind turbine blades
Before deploying new equipment in an offshore environment, testing is vital and can reduce the time and cost of manufacturing longer blades. Replicating the harsh conditions within the confines of a test hall requires access to specialist, purpose-built facilities.
Other content from Ingenia
Quick read

- Environment & sustainability
- Opinion
A young engineer’s perspective on the good, the bad and the ugly of COP27

- Environment & sustainability
- Issue 95
How do we pay for net zero technologies?
Quick read

- Transport
- Mechanical
- How I got here
Electrifying trains and STEMAZING outreach

- Civil & structural
- Environment & sustainability
- Issue 95