- Health & medical
- Issue 73
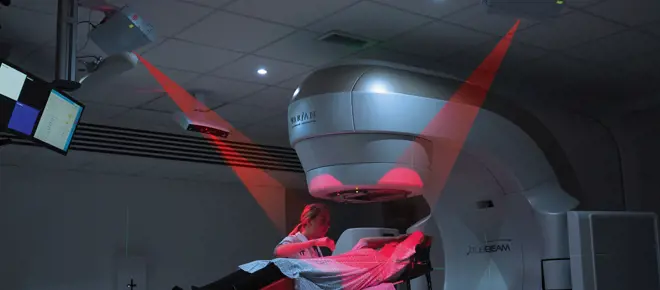
Accurate targeting of tumours
Radiotherapy allows doctors to shrink tumours that cannot be surgically removed but there is a risk of damage to healthy tissue if the patient moves. Vision RT accurately tracks a patient’s position before and during treatment.

- Civil & structural
- Issue 73
Copenhagen's 'kissing' bridge
An innovative sliding bridge opened to the public in Copenhagen in the summer of 2016. Although the project faced various challenges and delays, the Inner Harbour Bridge (Inderhavnsbroen) has reduced commuting time for thousands of pedestrians and cyclists in the Danish capital each day.
Quick read

- Technology & robotics
- How does that work?
- Issue 73
Drones
Unmanned aerial vehicles have been in operation for many years, particularly for military purposes. However, recent advances in technology have increased the potential uses of drones, such as for aerial photography, agriculture, and search and rescue.
Quick read

- Materials
- How I got here
- Issue 73
Q&A: Anna Ploszajski
Anna Ploszajski is a materials engineer and science communicator who wants to bring materials engineering to the wider public. She completed an engineering doctorate in hydrogen storage materials at UCL.
- Electricals & electronics
- Issue 73
Image revolutionaries
In February 2017, the four engineers responsible for the creation of digital imaging sensors were awarded the Queen Elizabeth Prize for Engineering. Find out about the development of the technology and how their contributions have revolutionised the way that visual information is captured and analysed.
- Electricals & electronics
- Technology & robotics
- Innovation Watch
- Issue 73
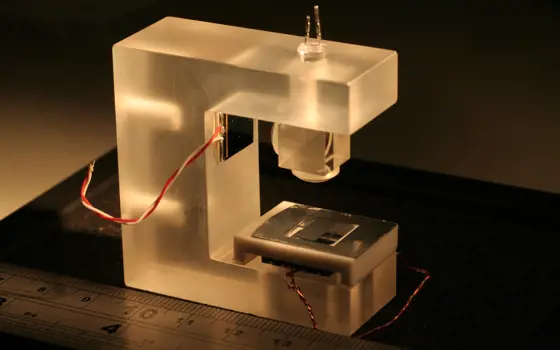
The world's smallest gravimeter
Researchers at the University of Glasgow have adapted smartphone accelerometer technology to make the first small and affordable gravimeter, the Wee-g, able to detect tiny changes in gravity.

- Health & medical
- Profiles
- Issue 73
A talent for bursting bubbles
Creatures of all sizes, from bacteria to whales, have shaped Professor Timothy Leighton FREng FRS FMedSci' career. It started where he began to research the physics of sound in water and then an invention to clean medical devices brought him into antimicrobial and antibiotic resistance.

- Mechanical
- Aerospace
- Issue 73
Ready to break records
In October 2017, almost a decade of engineering development finally came to fruition when the Bloodhound Supersonic Car embarked upon its first tests at Newquay Airport. Mark Chapman, Bloodhound’s Engineering Director, spoke about how it will attempt to break the world land speed record in South Africa.

- Civil & structural
- Issue 73
The sky's the limit
Tall buildings are rising in cities all over the world, at a rate and with a variety never seen before. Skyscraper designer and London-based structural engineer Kamran Moazami, talks about one of New York’s most recent skyscrapers – 432 Park Avenue – and the engineering challenges of designing tall buildings.